
发布时间:2023-04-27 作者:无锡微视传感科技有限公司 点击次数:3976
一、3D相机设备简介
3D相机是一种可以捕捉空间环境的摄像头装置。它采用一种数字技术,称为立体摄影术,可以捕捉照片中位置和尺度信息。3D相机不仅可以捕捉画面,还可以让用户建立虚拟环境或是做3D扫描。3D相机可以用于建筑和工程设计,安防和动画,以及其他虚拟现实应用。
3D相机在工业领域有很多应用。3D相机可以用来进行自动、远程和无需接触的检测,帮助企业避免错误、节约开支、提高效率。它可用于质量检查、产品检测、重量测定、机械识别等。此外,它还可以用于对特定对象的视觉定位和跟踪、机械仿真和机器人计算机视觉应用、工业场景的深入建模、物体的精准定位与测量等。
二、3D相机分类
根据原理分类:根据相机中所采用的3D成像原理,可以将3D相机分为结构光相机、时间飞行相机、立体视觉相机和双目立体相机等。
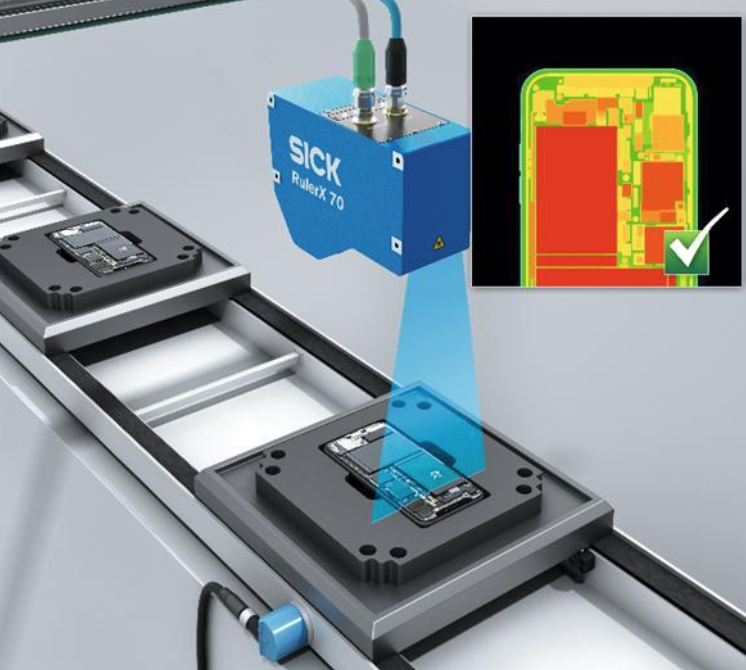
1)结构光3D相机
采用投射光条的方式,通过对被拍摄物体上的纹理进行匹配,来获取物体表面的深度信息。其核心技术是结构光投影和纹理匹配,常用于测量物体表面轮廓、三维形状和体积等信息。2)TOF(Time-of-flight)3D相机
2)TOF(Time-of-flight)3D相机
采用发送和接收光脉冲的方式,通过测量脉冲的往返时间来确定物体与相机的距离。其核心技术是时间测量和光信号处理,常用于物体长度、宽度和高度的测量。
3)双目或多目立体视觉3D相机
由两个或多个摄像头组成,通过计算摄像头之间的视差,来确定物体的深度信息。其核心技术是图像处理和计算机视觉,常用于机器人导航、人脸识别和障碍物检测等应用。
4)全景3D相机
将多个3D相机组合在一起,可以同时获取物体的外形和内部结构信息。其核心技术是相机控制和数据处理,常用于数字孪生技术、虚拟现实和增强现实等应用。
除了上述“根据原理分类”的方法,还可以根据工作原理分类:根据3D相机的图像采集方式和处理方式来分类,可以将3D相机分为光学3D相机、扫描3D相机和激光3D相机等;根据输出格式分类:根据3D相机所输出的格式不同,可以将3D相机分为点云型3D相机、矢量型3D相机和三角面型3D相机等。
三、3D相机在生产制造领域的应用
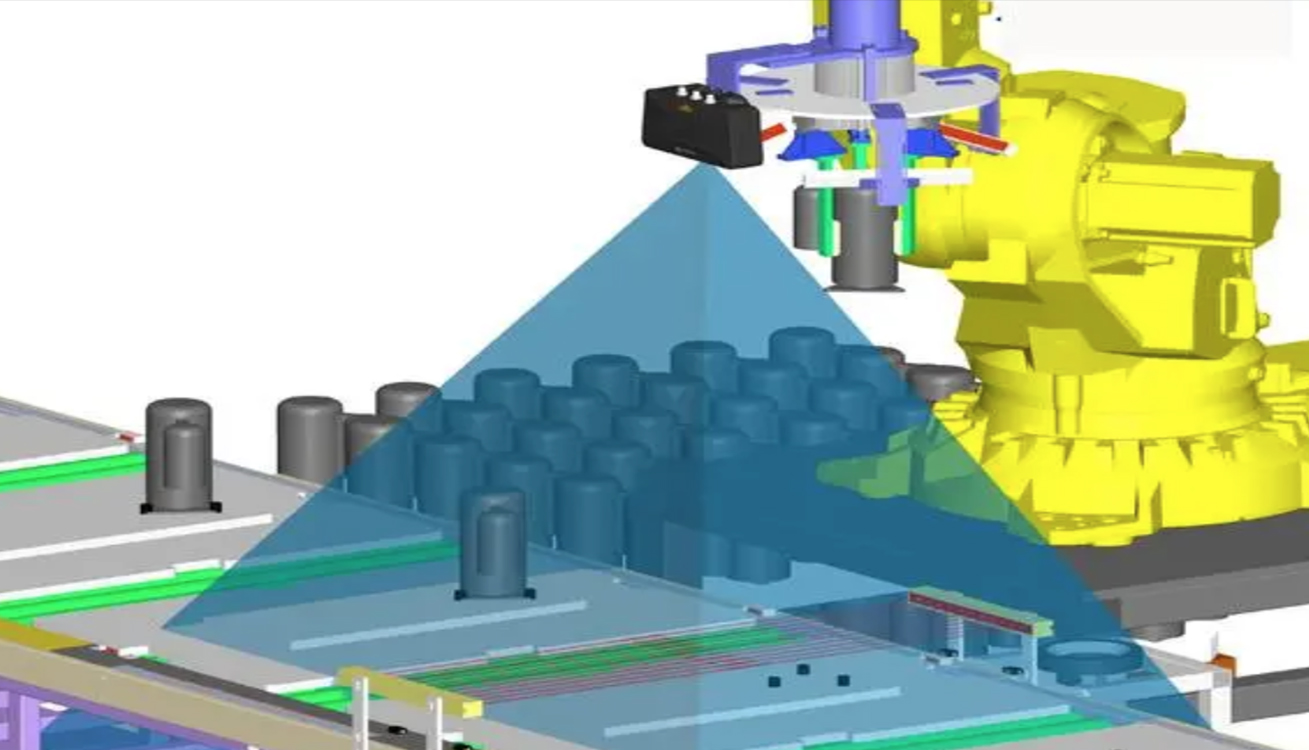
1)3D点云应用(空间测量应用)
该技术原理主要是利用3D相机获取物体的深度信息并转换成三维坐标系的点云数据,通过点云数据的处理和分析实现物体的空间测量。通过三维相机的扫描和分析,产品的质量可以快速、准确地检测出来,从而避免了人工检测的误差和浪费。例如,3D相机可以精确测量工件的三维几何尺寸和形态,以便进行机械加工和装配。
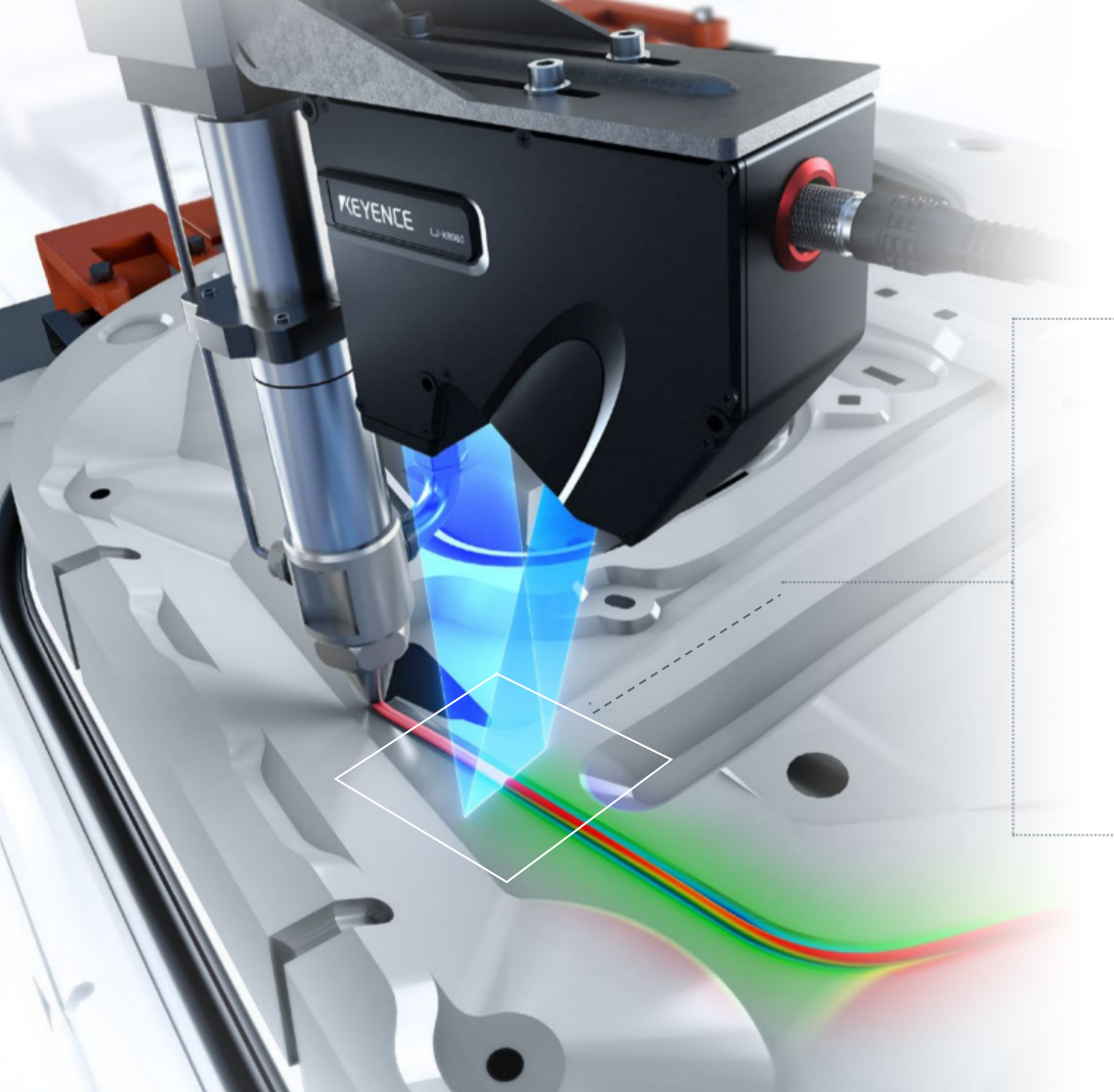
2)表面测量应用
该技术原理主要是利用3D相机获取物体的表面几何信息,包括表面的形状、大小、轮廓等,实现物体表面的精确测量,从而得到其几何形状、表面曲率、大小等详细信息。例如,可以快速、准确地检测工件表面的缺陷、损伤和瑕疵等质量问题,以便及时采取措施进行修复或调整。
3)立体视觉应用
3D相机可以利用双目视觉原理或者结构光原理等技术,实现立体视觉,通过对物体的深度信息进行捕捉、识别和处理,用于机器视觉、物体定位、抓取和识别等方面。例如,在电子制造领域,3D相机可以捕捉和识别物体的形状和位置信息,实现自动化的零件定位和装配。
4)3D扫描和建模
3D相机可以扫描物体表面并生成三维模型,用于数字化设计和工程分析。例如,在航空航天领域,使用3D相机可以快速扫描飞机部件并生成数字化模型,从而进行工程分析和优化。
5)机器人导航
通过3D相机的双目立体视觉,计算机器人与障碍物之间的距离和视角等信息,实现机器人的自主导航。

在技术原理上,基于3D相机的空间测量应用主要是通过获取物体的深度信息,计算物体在三维空间中的精确位置和尺寸。而立体视觉应用则是通过利用两个或多个相机采集到的图像,来判断物体在三维空间中的位置和距离。两者都需要进行图像处理和计算,来获取物体的空间信息。但是,基于3D相机的空间测量应用更注重测量精度和精确度,而立体视觉应用更注重形态重建和表征。另外,立体视觉应用中还需要进行图像匹配和立体匹配算法,以获取更准确的三维空间信息。
四、3D相机的选型
工业制造领域,在不同的应用场景选择哪种3D相机应该根据应用场景和精度要求而定,平衡精度和成本。
激光扫描仪的优势在于精度高,可以达到亚毫米级别,适用于高精度的应用场景,如汽车模具、航空模型等。劣势在于扫描速度较慢,不太适合大规模的生产线应用。造价一般较高,数千美元到数十万美元不等,视精度和应用场景而定。
结构光扫描仪的优势在于扫描速度快,可以达到几十秒到几分钟内完成扫描,适用于大规模生产线的应用场景。劣势在于精度相对激光扫描仪较低,一般达到毫米级别。造价相对较低,数百到数千美元不等,视精度和应用场景而定。
出自《智能制造趋势》公众号
